
👨🎓 About Me
Greetings! I am currently a first-year PhD student at The University of Texas at Austin, affiliated with Texas Robotics. My research is driven by a profound passion for exploring and integrating the realms of optimization, control, and machine learning to pioneer advancements in autonomous robotics systems, particularly in unstructured environments. I am honored to have my research supported by the UT Austin School of Engineering (SoE) Fellowship.
🔥 News
- February 2024: 🏆 Graduate Student Assembly Travel Award - Honored to be one of the 16 recipients across all UT graduate students this year. A big thank you to the selection committee for acknowledging my research efforts and dedication. Hook ‘Em!
- October 2023: 🏅 Professional Development Award from UT Austin Graduate School: Grateful for this recognition and the support towards my professional growth.
- October 2023: 🗣 Oral Presentation at IROS 2023 - Delighted to present my V2X-Lead paper in Detroit and to receive the IROS 2023 Travel Grant. My heartfelt thanks to the IROS committee for their encouragement and backing.
- August 2023: 💡 UT Austin School of Engineering (SoE) Fellowship - Received with gratitude. Thank you, Cockrell School of Engineering and Graduate School, for supporting my research endeavors during my PhD journey.
- August 2023: 🛬 Starting My PhD Journey - Safely arrived in Austin, ready to embark on my PhD at UT. Excited to be part of this vibrant campus and to collaborate with esteemed faculty members and students.
📝 Publications
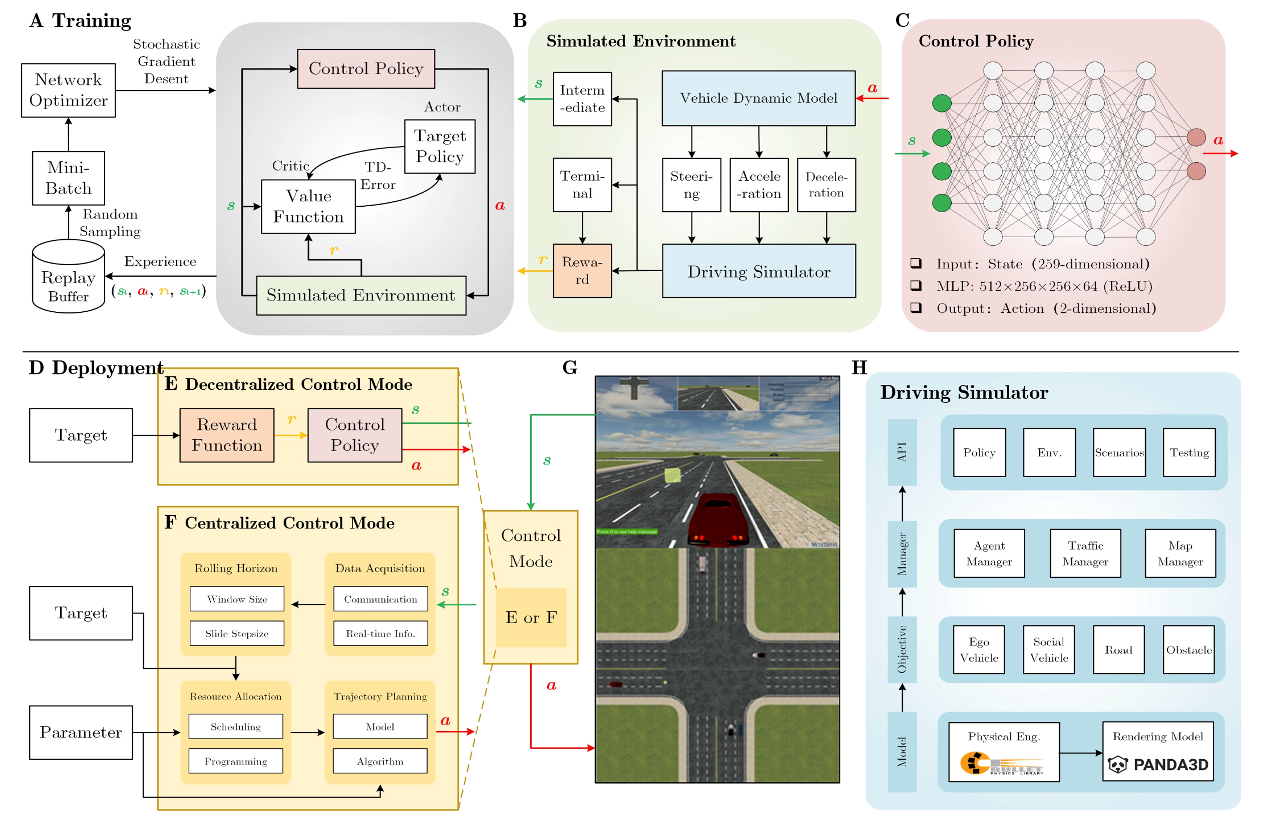
[1] V2X-Lead: Lidar-based End-to-End Autonomous Driving with Vehicle-to-Everything Communication Integration. Zhiyun Deng, Yanjun Shi, and Weiming Shen.
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
- Utilized vehicle-to-everything communication to enhance the safety and efficiency of an end-to-end autonomous driving agent trained by a reinforcement learning algorithm, particularly when the agent’s vision is obstructed by other vehicles in mixed-autonomy traffic.
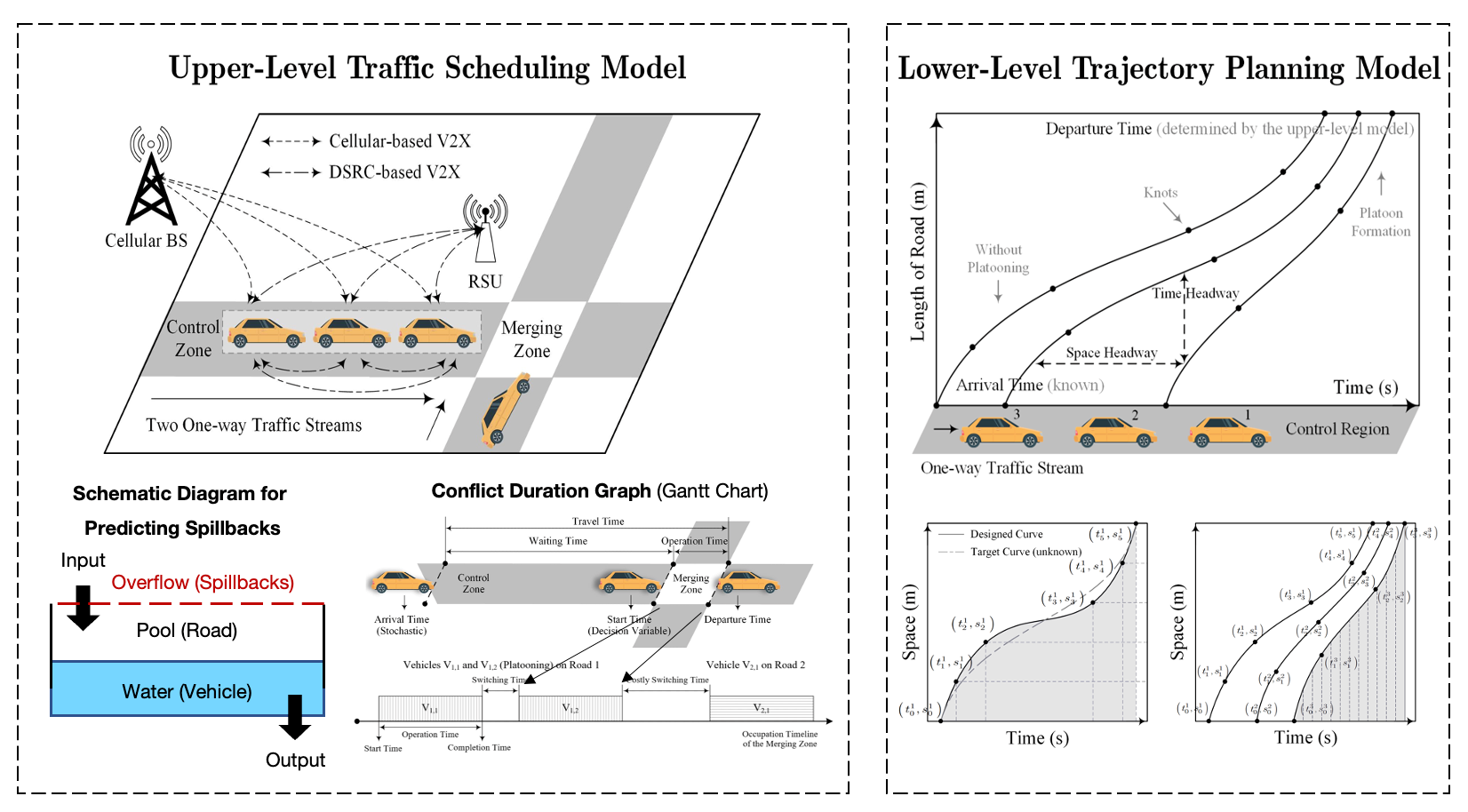
[2] Cooperative Platoon Formation of Connected and Autonomous Vehicles: Towards Efficient Merging Coordination at Unsignalized Intersections. Zhiyun Deng, Kaidi Yang, Weiming Shen, and Yanjun Shi.
IEEE Transactions on Intelligent Transportation Systems (IEEE TITS), 2023.
- Proposed a bi-level optimization method that can jointly optimize the passing sequences and trajectories of vehicles at traffic intersections, effectively enhancing the safety of vehicle interaction and improving overall traffic efficiency.
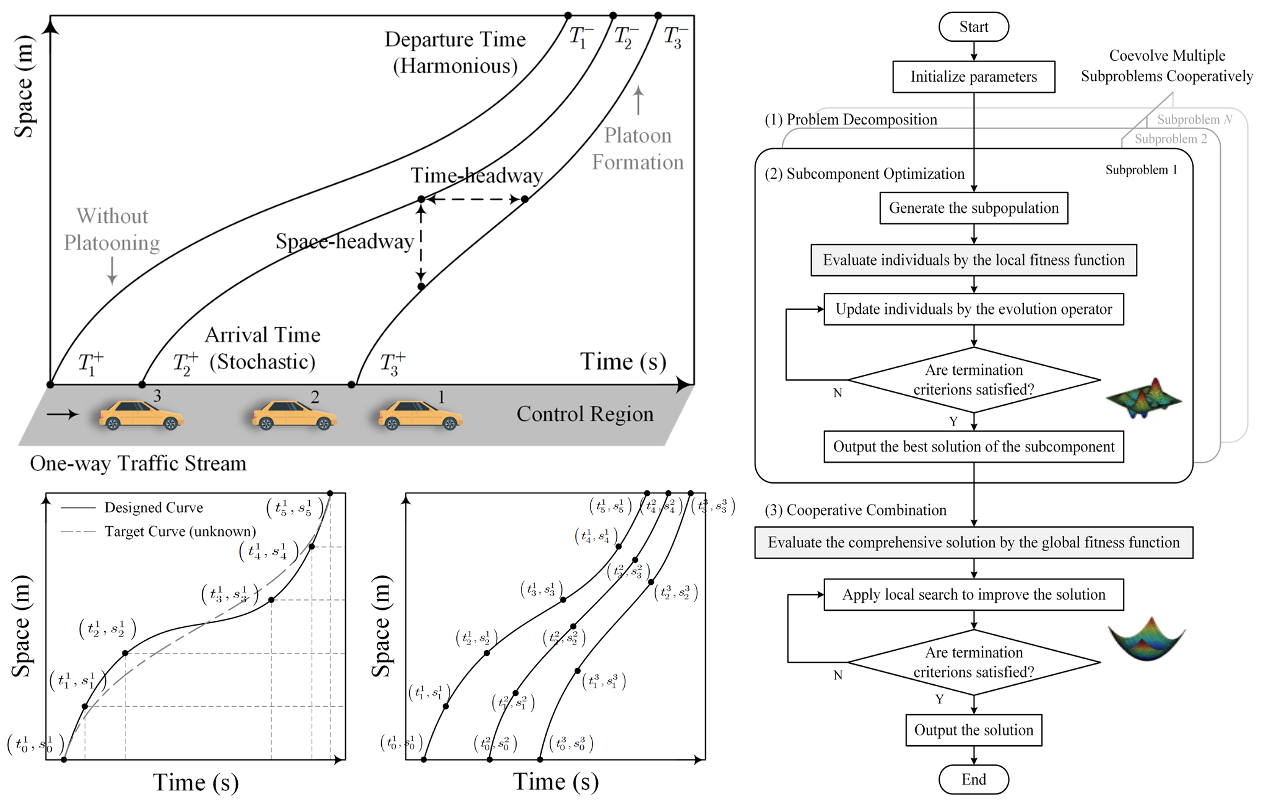
[3] A Coevolutionary Algorithm for Cooperative Platoon Formation of Connected and Automated Vehicles. Zhiyun Deng, Jiaxin Fan, Yanjun Shi, and Weiming Shen.
IEEE Transactions on Vehicular Technology (IEEE TVT), 2022.
- Developed a trajectory planning method that reduced fuel consumption for platoons of vehicles (where vehicles travel closely together in a group, like a virtual train) on highways, enabling more eco-friendly and cost-effective transportation.
[4] A Conflict Duration Graph-based Coordination Method for Connected and Automated Vehicles at Signal-Free Intersections. Zhiyun Deng, Yanjun Shi, Qiaomei Han, Lingling Lv, and Weiming Shen.
Applied Sciences, 2020.
- Developed a trajectory planning method that prioritized passenger comfort by minimizing the number of sudden stops and starts at traffic intersections, resulting in a more pleasant and enjoyable travel experience.
[5] Zhiyun Deng, Jiaxin Fan, Yanjun Shi, and Weiming Shen, Longitudinal Trajectory Optimization for Connected and Automated Vehicles by Evolving Cubic Splines with Coevolution, IEEE 25th International Conference on Computer Supported Cooperative Work in Design (IEEE CSCWD 2022).
Dissertations
[6] Zhiyun Deng, Collaborative Control of Multi-Vehicle Systems at Autonomous Intersections without Signal Controllers (in Chinese), Master’s Thesis, Huazhong University of Science and Technology, 2022.
[7] Zhiyun Deng, Autonomous Intersection Management with Connected and Automated Vehicles (in Chinese), Bachelor’s Thesis, Wuhan University of Technology, 2020.
📚 Projects
2024.01 – present, Visual Representation Learning for Terrain-Aware Off-Road Navigation
- To be updated.
2023.08 – present, Human-Robot Interaction (HRI) Data Modeling and Curation
- Design a generalizable robotics data model across various research projects and implement it in a NEO4J graph database, hosted on Texas Advanced Computing Center (TACC)’s cloud service with high performance computing and storage capabilities to enhance convergence and data utilization.
2023.08 – 2023.12, Hierarchical and Multi-Task Imitation Learning for Manipulation
- Implement hierarchical mitation learning to train robot policies from human demonstrations using camera images as input.
- Integrate an inverse dynamics model for converting task-space commands into precise joint-torque actuations for manipulators.
- Explore multi-task imitation learning approaches to incorporate multiple manipulation tasks into a unified policy network, employing network pruning techniques to prevent catastrophic forgetting and refine overall performance.
2020.09 – 2022.06, Collaborative Control of Connected and Autonomous Vehicles (CAVs)
- Formulated an integrated optimization model for traffic scheduling and trajectory planning, coordinating the motion of multiple CAVs at challenging driving scenarios like unsignalized intersections, enhancing overall traffic efficiency.
- Developed a lidar-based end-to-end autonomous driving framework that utilizes vehicle-to-everything communication to boost safety and efficiency in mixed-autonomy traffic, employing reinforcement learning algorithms for policy training.
🏆 Honors and Awards
Fellowship/Scholarships:
- [2024.02] Graduate Student Assembly Travel Award, UT Austin Graduate Student Assembly
- [2023.10] Professional Development Award, UT Austin Graduate School
- [2023.10] IROS 2023 Travel Grant, IEEE IROS Travel Award Committee
- [2023.08] UT Austin School of Engineering (SoE) Fellowship, UT Austin Cockrell School of Engineering and UT Austin Graduate School
- [2021.12] National Scholarship, Ministry of Education of China
- [2021.11] First-Class Scholarship , Huazhong University of Science and Technology
- [2020.11] First-Class Scholarship, Huazhong University of Science and Technology
Honors:
- [2022.06] Outstanding Graduate Award, Huazhong University of Science and Technology
- [2020.06] Outstanding Dissertation Award, Wuhan University of Technology
- [2022.06] Outstanding Graduate Award, Wuhan University of Technology
📖 Educations
- 2023.08 – 2028.05 (expected), Ph.D. in Mechanical Engineering (Robotics), The University of Texas at Austin, Austin, United States.
- 2020.09 – 2022.06, M.Sc. in Mechanical Engineering, Huazhong University of Science and Technology, Wuhan, China.
- 2016.09 – 2020.06, B.Eng. in Automotive Engineering, Wuhan University of Technology, Wuhan, China.
💻 Experience
- 2024.01 – Present, Graduate Research Assistant, The University of Texas at Austin.
- 2023.08 – Present, Graduate Research Assistant, Texas Advanced Computing Center (TACC).
- 2022.07 – 2023.06, Graduate Research Assistant, Huazhong University of Science and Technology.
📚 Professional Services
Reviewer:
- IEEE Robotics and Automation Letters (RA-L)
- IEEE Transactions on Intelligent Vehicle (IEEE TIV)
- IEEE Transactions on Vehicular Technology (IEEE TVT)
Teaching Assistant:
- Electronic Circuit Design and Simulation, HUST (Fall 2020, Spring 2020, Fall 2021, Spring 2021)